AC Motors |
| |
Although commutator and brush assemblies
may be used in some types of alternating
current motors, brushless inductiontype
designs are by far the most common
for motors operating on AC supplies. |
| |
| AC MOTOR
ACTION |
In an AC motor, the stator winding sets
up a magnetic field which reacts with the
current-carrying conductors of the rotor to
produce rotational torques. The rotor
currents are induced in the rotor conductors by the stator’s changing magnetic field,
rather than by means of a commutator and
brushes. This induction action is the central
operating principle of AC induction
motors.
AC power is commercially supplied in
both single-phase and three-phase forms.
The essential operating characteristics of
AC induction motors will vary according to:
- winding types (split-phase, shaded-pole,
three-phase, etc.), and
- the number of phases, the frequency and
the voltage of the power source.
|
We will consider polyphase motors first,
since their operation is somewhat simpler
and more easily understood than singlephase
machines. |
| |
| POLYPHASE
(TWO OR MORE
PHASES) MOTORS |
| The production of a rotating magnetic
field can be simply illustrated by considering
a two-phase motor with two embedded
stator windings for establishing the magnetic
fields. Each coil, for simplicity, shall consist
of a single loop of wire connected to
one phase of a two-phase AC supply. We
shall refer to the coil supplied by phase 1
current as Coil 1, and the coil supplied by
phase 2 current as Coil 2. The two coils
are placed at a right angle to each other in
the stator core, with each coil creating a
two-pole field. See figure below. |
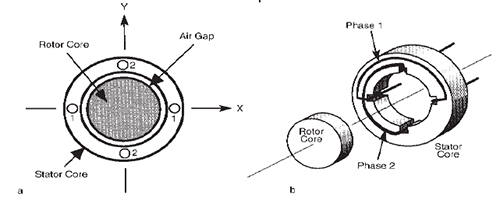 |
Simplified diagram of a two-phase AC motor (left), and cross-section of a
two-phase AC motor showing phase 1 and phase 2 windings (right). |
|
The output waveform of the two-phase
AC supply is represented below. The
voltage in each phase varies sinusoidally in
time and one lags the other by π/2 radians
or 90° (electrical)*.
*One complete cycle = 2π radians or 360° (electrical). |
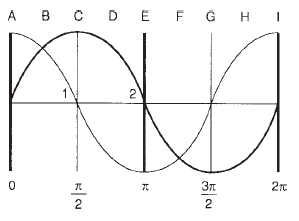 |
Waveforms produced by twophase
AC. |
|
| Let us first consider Coil 1 only. When
the phase 1 current is in its positive portion
of the cycle (current enters Coil 1 from the
right and exits on the left), a magnetic field is set up which points in the positive (+Y)
direction. See below. |
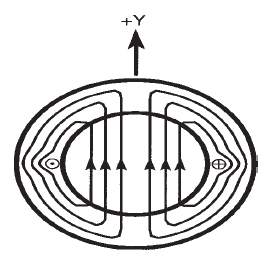 |
Magnetic field set up when
phase 1 is in positive cycle. |
|
| When the current
flows in the opposite direction during the
negative portion of its cycle, the magnetic
field points in the negative (-Y) direction. See below. Since the strength of the
magnetic field (H) is proportional to the
amount of current flowing through the coil,
the field strength also oscillates sinusoidally
in time. |
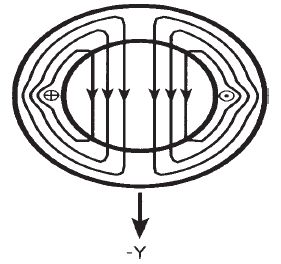 |
Magnetic field set up when
phase 1 is in negative cycle. |
|
| Similarly, we can illustrate in the figure below the magnetic field due to current
flowing in Coil 2. |
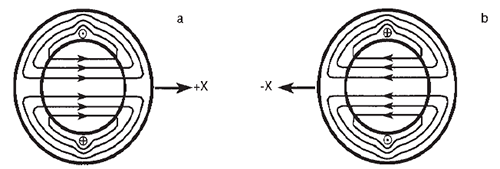 |
a). Magnetic field set up when
phase 2 is in positive cycle.
b). Magnetic field set up when
phase 2 is in negative cycle. |
|
| Now we have two perpendicular fields.
Each varies sinusoidally in time, and one
lags the other by π/2 radians. The combined
effect (vector sum) of the two fields is a rotating resultant field. The figure below illustrates
the progression of the rotation at
eight different points in time. |
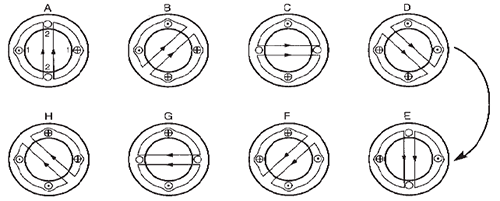 |
Progression of the magnetic field in a two-phase stator at eight different
instants. |
|
It can also be shown mathematically that
the magnetic field rotates. If we choose the
center of the stator as our reference point,
we can define BY and BX as the magnitudes
of the magnetic flux densities due to the
currents flowing through Coil 1 and Coil 2
respectively. Both BY and BX are functions
of their respective currents* and are functions
of time. Also, due to symmetry, their
peak values are the same.
*This assumes a constant permeability in the ferromagnetic structure.
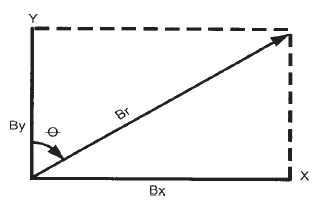
Since BY and BX vary sinusoidally with
their corresponding currents we can express
them in the following equations: |
 |
where:
B = peak value of either BY or BX
f = frequency of the supply current
(cycles/unit time)
t = time
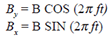
Let Br be the resultant value of BY and
BX and let Ø be the angle of B with respect
to the axis as shown below. |
 |
The vector sum of BY and BX is
resultant field Br. |
|
| For
example: |
 |
| Hence, Ø is increasing at a rate of 2πf
radians per unit time. In other words, Br is
rotating with the same frequency as the
supply current. We can also show that the magnitude of Br
remains constant during rotation, since: |
 |
Since B is independent of time, the
magnitude of the rotating resultant field (Br)
is constant.
We have demonstrated that a rotating
magnetic field is generated in a two-phase
stator. These basic analyses can be
extended to a three-phase stator and show
that it also has a rotating field. Therefore,
we will not go into detail with three-phase
stators.
The rotor of a typical induction motor is
constructed from a series of steel laminations,
each punched with slots or holes
along its periphery. When laminations are
stacked together and riveted, these holes
form channels which are filled with a conductive
material (usually copper or aluminum)
and short-circuited to each other by
means of conducting end rings. The conductors
are typically formed by die-casting.
This one-piece casting usually includes
integral fan blades which create a built-in
cooling device. The common term for this
type of rotor is "squirrel cage" (because of
its resemblance to the runway of an old fashioned
squirrel cage). It is an inexpensive
and common form of AC induction
rotor. See figure below. |
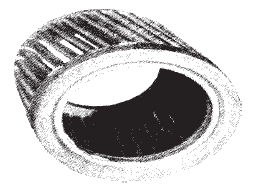 |
Aluminum conductors in an
AC induction rotor. The steel laminations
have been removed to illustrate the
"squirrel cage" form of the cast aluminum
conductors. |
|
As the rotating field sweeps past the
bars in the rotor, an induced current is developed.
Since the flow of current in a conductor
sets up a magnetic field with a corresponding polarity, an attraction will result
between the rotating magnetic field of the
stator and the induced field in the rotor.
Rotation results from the motor's attempt
to keep up with the rotating magnetic field.
The rate of change at which the lines of
flux cut the rotor determines the voltage
induced. When the rotor is stationary, this
voltage is at its maximum. As rotor speed
increases, the current and corresponding
torque decreases. At the point of synchronous
speed (speed of the rotating field), the
induced current and developed torque both
equal zero.
The rotor in a non synchronous AC
induction motor will always operate at
some speed less than synchronous unless it
is aided by some supplementary driving
device. This lag of the rotor behind the
rotating magnetic field is called "slip", and is
expressed as a percentage of synchronous
speed: |
 |
| In designing rotors for induction motors,
the shape and dimensions of the slots have
a demonstrable effect on the performance
characteristics of the motor. This variation
is illustrated below. |
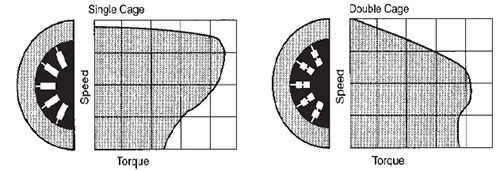 |
Comparison of speed / torque characteristics for single cage (left) and
double cage (right) integral hp rotor design. |
|
Another design factor common to most
squirrel cage induction rotors is the ing the slots at a slight angle to the shaft) to
avoid cogging action and wide variations in
starting torque which may result when bars
are placed parallel to the stator slots. |
| |
| SINGLE-PHASE |
We have demonstrated in the previous
section that two-phase and three-phase
induction motors will create a rotating magnetic
field corresponding to excitation of
the stator windings.
In the single-phase induction motor,
there is only one phase active during normal
running. Although it will pulse with intensity,
the field established by the singlephase
winding will not rotate. If a squirrel
cage rotor were introduced into the air gap
between the stator poles of a single-phase
motor, it might vibrate intensely but would
not initiate rotation. However, the rotor
shaft will start to rotate in either direction if
given a push.
This rotation sets up an elliptical revolving
field which turns in the same direction
as the rotor. The “double rotating field theory”
and the “cross-field theory” explain
why a single-phase motor will rotate if it is
started by some means. Due to the complexity
of the mathematics involved, they
will not be discussed here. What is important
to remember is that single-phase AC
motors require an auxiliary starting scheme. |
| |
| SINGLE-PHASE
AC MOTOR TYPES |
| Single-phase motors, without the aid of
a starting device, will have no inherent
“starting” torque. To produce torque,
some means must be employed to create a
rotating field to start the rotor moving. A
number of different methods are used. The
particular method used determines the
“motor type.” An explanation of the various
types follows. |
| |
| Split-Phase
(Non synchronous) |
Features: |
- Continuous duty
- AC power supply
- Reversibility normally at rest
- Relatively constant speed
- Starting torque 175% and up
(of rated torque)
- High starting current (5 to 10
times rated current)
|
Design and Operation: |
Splitphase
motors are perhaps the most widely
used relatively constant speed AC motors
(of appreciable output) employed for driving
domestic appliances. Also used for a
variety of industrial applications, motors of
this type are relatively simple in construction
and lower in cost than most other
types. Low cost, plus good efficiency,
starting torque and relatively good output
for a given frame size have made the splitphase
AC induction motor today’s general
purpose drive. See figure below. |
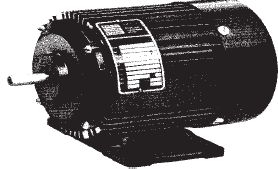 |
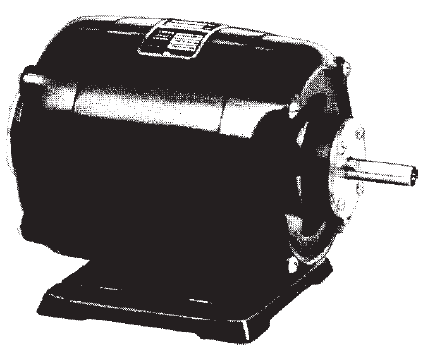
Split-phase (nonsynchronous)
motor. |
|
| Split-phase motors are single-phase
motors equipped with main and auxiliary
windings connected in parallel (during the
start cycle). The auxiliary winding shares
the same slots as the main winding, but is
displaced in space. See figure below. To give the design its unique starting characteristic,
the auxiliary winding is wound with finer
wire and fewer turns (for high resistance
and low reactance) than the main winding,
and the current flowing through it is substantially
in phase with the line voltage. The
current flowing through the main windings,
because of their lower resistance and higher
reactance, will tend to lag behind the line
voltage in time. This lagging effect will act
to “split” the single-phase of the AC power
supply by causing a phase (time) displacement
between the currents in the two
windings. |
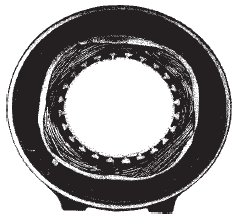 |
Typical four-pole,
split-phase stator. |
|
| The space and phase displacement of
the main and auxiliary windings produce a
rotating magnetic field which interacts with
the rotor to cause it to start (begin rotating).
After the split-phase motor has attained
approximately 70% of rated speed,
the auxiliary winding is automatically disconnected
from the circuit by means of a
centrifugal switch or current sensitive relay.
The motor will then continue to run on the
single oscillating field established by the
main winding. See figures below. |
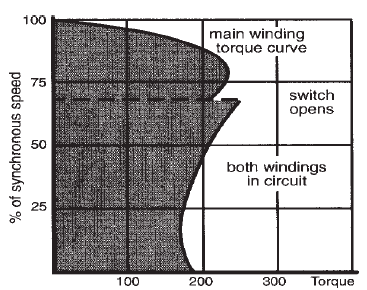 |
Speed / torque curve for a typical split-phase AC motor. |
|
| |
 |
Example of a centrifugal cutout
mechanism used on split-phase motors. |
|
Advantages: |
Split-phase motors
will operate at relatively constant speed,
typically from about 1790 RPM at no load
to 1725 or 1700 RPM at full load for a
four-pole, 60 Hz motor.
A standard four-wire split-phase motor
can be reversed at standstill or while
operating at a speed low enough to ensure
that the auxiliary winding is in the circuit.
Split-phase designs can also be reversed at
full speed if a special switching device is
used to connect the starting winding in the
reverse direction sufficiently long to reverse
the motor. This normally is not done,
however, because of the danger of burning
out the starting winding during a long
reversal period.
Perhaps the most important feature associated
with split-phase motors is their
relatively low initial cost. The high starting
torque combined with simple, reliable construction
make split-phase AC motors ideal
for many general purpose applications.
Since the rate at which the motor can be
accelerated is often a primary concern to
the applications engineer, split-phase designs
are often specified because of their
ability to come up to speed rapidly (reaching
running speeds with normal loads in a
fraction of a second). |
Disadvantages: |
Because of the
high resistance of the starting winding, repeated
starting and stopping will heat the
windings (in particular, the starting winding)
and result in loss of torque and possible
winding damage. This is one of the
reasons why it is not practical to apply
split-phase motors when very frequent starts are required, or where high inertial
loads must be accelerated.
Split-phase motors have a high starting
current which can range from 5 to 10 times
the current drawn while running. If the
starting load is heavy, the wiring between
the motor and the power source must be of
adequate size to prevent excessive voltage
drop. The low voltage conditions resulting
from inadequate wire size will result in decreased
motor starting torque. Frequent
starts, coupled with inherent high starting
current, can also adversely affect starting
switch or relay life. |
Cautions: |
The auxiliary starting
winding in a split-phase motor is designed
for very short duty. If it stays in the circuit
for more than a few seconds, the relatively
high starting current which it draws can
cause overheating of the winding. Should
this happen, a more powerful motor or a
motor having different electrical characteristics
should be considered.
Caution should be used when driving
high inertial loads with split - phase motors.
This type of load can prolong the
acceleration and “hang” too long on the
starting winding. |
| |
| Capacitor
(Nonsynchronous) |
Features: |
- Continuous duty
- AC power supply
- Reversibility at rest or during rotation,
except split-phase capacitor start which
is normally at rest only
- Relatively constant speed
- Starting torque 75% to 150% of rated
torque
- Starting torque 75% to 150% of rated
torque
|
Design and Operation: |
Capacitor
action described in Chapter 1 has
been found to provide specific performance
improvements when used with single-
phase AC motors. See figure below. |
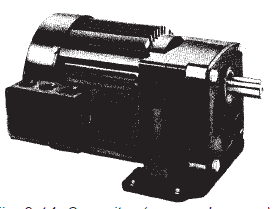 |
Capacitor (nonsynchronous)
gearmotor. |
|
The
types of capacitors used and the method of
operation varies with motor type (see below.). The operating characteristics of
each type are quite different and will be
treated separately. |
 |
Comparison of continuous duty
AC-type capacitor and electrolytic
capacitors. |
|
In general, there are
three distinct capacitor motor types:
- Capacitor Start (CS)— motors use
one electrolytic capacitor in the starting
mode only,
- Permanent Split Capacitor (PSC)—
motors may operate with one permanently-
connected, continuous-duty AC type
capacitor for both starting and
running, and
- Two Capacitor Start/One Capacitor
Run — motors use one continuous duty
AC-type and one electrolytic capacitor
in the start mode and switch out
the electrolytic capacitor while running.
|
Capacitor Start (CS): |
The capacitor
start motor is essentially a splitphase
motor which has two separate windings:
a main or, “running” winding and an
auxiliary or “starting” winding. However, in
the capacitor start motor, an electrolytic
capacitor is added in series with the start
winding during the starting mode to increase
starting torque and/or reduce starting
current. As in the case of the splitphase
design, the starting winding and capacitor will be disconnected when the
motor has reached approximately 70% of
running speed.
Like the conventional split-phase motor,
the capacitor start design runs with only the
main winding energized. This “run” winding
sets up a pulsating magnetic field which
interacts with the rotor to develop the necessary
running torque and speed. Since the
“run” winding alone has no starting capability,
both starting and running windings
are energized while starting. Because of the
high resistance-to-inductance ratio of the
“start” winding relative to the “run” winding,
the currents in the two windings (when
energized) are sufficiently displaced (time wise)
from each other to produce a rotating
magnetic field and the necessary torque
for starting.
The addition of a capacitor, in series
with the “start” winding, can significantly
enhance the starting characteristics by improving
the phase relationship between the
“run” and the “start” windings. With the
proper selection of capacitor value, the
starting torque can be increased and/or the
starting current decreased. Of course, capacitor
values must be carefully selected to
produce this effect. Because the CS motor’s
capacitor is used only when starting,
its duty cycle is very intermittent. Thus, an
inexpensive and relatively small AC electrolytic-
type capacitor can be used in CS
designs. The normal, non-polarized, AC
electrolytic capacitor consists of two aluminum plates separated by a porous paper
which is saturated with an electrolyte. |
Permanent Split Capacitor
(PSC): |
When split-phase or capacitor
start (CS) motors are applied in applications
which require long or frequent starts,
the motor may tend to overheat and adversely
affect the system reliability. In this
type of application, PSC motors should be
considered.
The PSC capacitor winding is permanently
connected in series with a continuous-
duty AC-type capacitor. In contrast to
the split-phase or capacitor start motor, the
“second” winding is energized at all times.
The capacitor used with PSC designs is
rated for continuous duty and consists of
aluminum plates separated by a film
dieletric.
Permanent split capacitor motors operate
in much the same way as two-phase
AC motors. The capacitor in the PSC design
causes the current in the capacitor
winding to be out of phase (with respect
to time) with the current in the main winding,
thus a rotating magnetic field is created.
This action gives the PSC motor greater
efficiency and quieter, generally
smoother operation than the split-phase
and the split-phase capacitor start designs.
See figure below. |
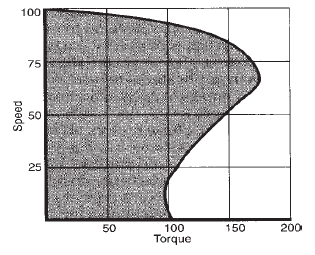 |
Typical performance of a
1/15 hp (50 watt) PSC motor. |
|
Two Capacitor Start/One
Capacitor Run: |
A variation on the
permanent split capacitor design, the two
capacitor motor uses an electrolytic capacitor
for starting in addition to the continuous-
duty AC-type capacitor used for both
starting and running. The use of two capacitors
helps to preserve the efficiency and
quietness of the PSC motor while running
and produces a corresponding improvement
in the starting characteristics. If we
increase the value of the capacitor in a
PSC motor, we can normally improve
starting torque, but at the expense of running
performance. However, by using two
capacitors (one for running and two in parallel
for starting), optimum running and
starting characteristics can be obtained.
To understand how this works, it is
important to realize that the magnitude of
the current flowing in the capacitor winding
changes with the speed of the rotor. The
value of the current in the capacitor
winding is lowest when the rotor is at zero
speed, and highest when the rotor speed is
at its maximum. A capacitor and capacitor
winding combination that is optimized for
“locked rotor” or starting conditions will
not be optimum for normal running
operation. The watt input while running will
be high, and the current in the capacitor
winding will not lead the main current by
the ideal 90 degrees, resulting in inefficient
operation.
A capacitor and capacitor winding optimized
for running will be correspondingly
less efficient in the starting mode. The use
of two capacitors for starting and one for
running overcomes the compromise made
in the PSC designs. |
Advantages: |
In addition to the
improved starting torque characteristics
made possible by the capacitor in the capacitor
start split-phase design, the reduction
of starting current reduces the effect on
other equipment due to line voltage drop encountered with high starting current splitphase
designs. Lower starting current will
also contribute to longer life and greater
reliability in switches and relays.
In general (for a given horsepower
rating), although the permanent split
capacitor motor is more expensive than
split-phase and capacitor start designs, it
produces quieter operation and provides
the frequent start/stop capability essential in
many applications. |
Disadvantages: |
Since the phase
angle in PSC motors changes with an
increase in load, performance will usually
be less satisfactory while starting. In usual
design practice, a compromise must
therefore be made between the starting and
running modes. Changing the capacitor
value specified by the manufacturer will
affect both running and starting characteristics
so that any improvements in starting
will usually result in a decrease in running
performance. |
Cautions: |
While an optimum capacitor
value can enhance motor performance,
an improper value of capacitance
can decrease performance. It is, therefore,
advisable to use the rated capacitor value
recommended by the manufacturer (on the
nameplate). Any change from the rated
value is usually detrimental to the design
and is not encouraged. When a failed capacitor
is replaced, it should always be
replaced with a capacitor of equal capacitance
and voltage rating. Voltage rating is
important for continued reliability and
safety.
It should also be noted that PSC motors
should be run at or near their rated load
points. Unlike other motor types, PSC
designs will tend to run hotter if lightly
loaded or unloaded. |
| |
| Shaded Pole
(Nonsynchronous) |
Features: |
- Continuous duty
- AC power supply
- Unidirectional reversibility
- Relatively constant speed
- Starting torque 50% to 80% of rated
torque
- Low starting current
|
Design and Operation: |
| A simple
and economical drive, the shaded pole
motor (see figure below) is used in countless consumer
and industrial applications ranging
from room air conditioners to advertising
displays. Shaded pole motors have no internal
switches, brushes or special parts,
and therefore offer substantial cost savings
in applications requiring relatively constant
speed and low power output. |
 |
Shaded pole (nonsynchronous)
motor. |
|
While split-phase motors make use of a
high resistance auxiliary or “starting” coil
wound similar to the main winding, shaded
pole designs use an entirely different type
of stator lamination which allows for a set
of salient poles* surrounded by the main
windings.
*A motor stator has salient poles when its poles are concentrated in relatively confined
arcs and the winding is wrapped around these poles (as opposed to distributing
the winding in a series of slots)
Salient poles are broad radial projections
(equal in number to the number of
poles) distributed around the active surface
of a rotor or stator and around which
windings may be coiled. See figure below.
These are full pole pitch windings which
are fractionally distributed in a series of
slots. |
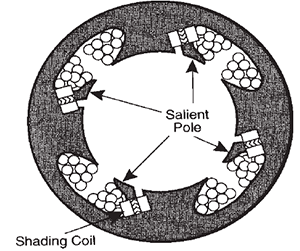 |
Cross-section of a typical
shaded pole motor. Note the larger
salient poles and the smaller shading
poles on one side. |
|
Embedded in a portion of the face of
each salient pole is a single turn of conducting
material, usually copper. These
turns are known as shading coils. The main
winding in a shaded pole motor is connected
to the power supply, while the shading
coils form closed circuits on themselves.
The time-varying magnetic field set up
by the alternating current in the main winding
induces a current in the shading coils.
This induced current will, in turn, establish
an additional magnetic field in the shaded
part of the pole face. This additional field
lags behind the main winding field in time.
With the main and shading coils displaced
from each other, a moving or revolving
magnetic field is set up in the stator which
interacts with the squirrel cage rotor to
produce rotation in a direction from the
center of the salient stator pole toward the
shaded pole tips. |
Advantages: |
Above all, the shaded
pole motor is simple in design and construction,
making it readily adaptable to
high-volume, low-cost production. Because
there are no internal switches, brushes
or special parts, motors of this type can
be extremely dependable. Depending upon
construction, shaded pole motors are relatively
quiet and free from vibration. Shaded
pole designs are normally available in sizes
from sub fractional to approximately 1/4 hp
(186 W).
The shaded pole motor is classified as a
relatively constant speed machine, and
running efficiency will increase with load.
Variation in applied load will not significantly
affect motor speed, providing that
the motor is not overloaded.See below.
Normal shaded pole designs also offer
the “fail-safe” feature of starting in only one
direction. With split-phase and capacitor
start motors, there is always the remote
possibility that they may start in reverse in
some failure modes (cutout switch doesn't’t
operate, open winding, etc.) |
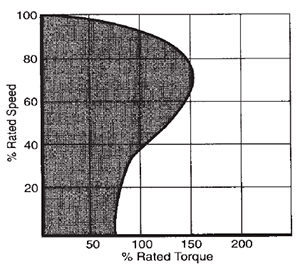 |
Typical characteristic curve for
a 1/150 hp (5 watt) shaded pole motor |
|
Disadvantages: |
Although a
shaded pole motor is rugged and inexpensive.
It typically has low starting torque and
running torque. Efficiency is also low, making shaded pole
motors impractical beyond fractional
horsepower sizes. Shaded pole motors are
generally used on light-load applications
where heat can be tolerated or supplemental
cooling is available.
While efficiency is relatively low, for
applications requiring minimal power
output, this limitation is compensated for by
its lower initial cost. However, with today’s
increased emphasis on energy savings,
shaded pole motor operating costs over
the life of the application should be
examined. |
| |
| SYNCHRONOUS
(POLYPHASE AND
SINGLE-PHASE) |
The “difference” between the speed of
the rotating magnetic field of an induction
motor (which is always synchronous) and
the speed of the rotor is known as “slip.”
When the rotor design enables it to “lock
into step” with the field, the slip is reduced
to zero and the motor is said to run at synchronous
speed. Upon reaching the running
mode, synchronous motors operate at constant
speed — the speed being dependent
on the frequency of the power supply.
This constant speed feature makes synchronous
motors a natural drive for timing
and other applications requiring a constant
speed output. |
Design and Operation: |
There
are two common types of small synchronous
motors, classified according to the
type of rotor used:
a) reluctance synchronous motors, and
b) hysteresis synchronous motors. |
Reluctance Synchronous: |
A
variation on the classic squirrel cage rotor,
the reluctance synchronous rotor is modified
to provide areas of high reluctance. This may be done by designing notches
(or flats) in the rotor periphery. The number
of notches will correspond to the number
of poles in the stator winding. The sections
of the rotor periphery between the
high reluctance areas are known as salient
poles. Since these poles create a low reluctance
path for the stator flux, they are
attracted to the poles of the stator field.
The reluctance synchronous rotor starts
and accelerates like a regular squirrel cage
rotor, but as it approaches the rotational
speed of the field, a critical point is reached
where there is an increased acceleration
and the rotor “snaps” into synchronism
with the stator field. If the load (particularly
inertial) is too great, the motor will not attain
synchronous speed. Motor “pull-in”
torque is defined as the maximum load that
the motor can accelerate and pull into synchronism
at rated voltage and frequency.
An applied load greater than the rated
“pull-in” torque will prevent the motor from
pulling the load into synchronism and will
result in rough, non uniform operation.
The phase relationship between the
poles of the rotating field and the rotor is
known as the coupling angle, expressed in
mechanical degrees. This coupling angle is
not rigid, but will “increase” with an increase
in load. At no load, the rotor poles
will line up with the field poles and the coupling
angle is considered to be zero.
When a load is applied to reluctance
synchronous motors, the magnetic lines of
force coupling the rotor to the stator field
are stretched, increasing the coupling angle.
If the load is increased beyond the motor’s
capability, the magnetic coupling between
the rotor poles and stator field will break,
and the rotor will “pull out” of synchronism.
“Pull-out” torque is defined as the
maximum torque the motor can deliver at
synchronous speed.
Reluctance synchronous motors may be
designed for poly phase operation, as well as single-phase versions in split-phase, CS
and PSC configurations. These motors
have characteristics comparable to their
nonsynchronous counterparts using the
same types of stator windings. For comparable
output in a given frame size, the
poly phase or PSC reluctance synchronous
motor will provide quieter operation and
more nearly uniform angular velocity than
the split-phase or CS reluctance synchronous
motor. As shown in the figure below, the
reluctance rotor can be skewed to improve
smoothness of operation. |
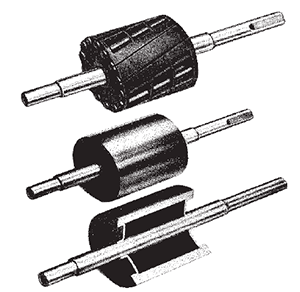 |
Comparison of typical reluctance
synchronous rotors (top) and
hysteresis synchronous rotors (middle
and bottom). |
|
Hysteresis Synchronous: |
Although the stator in a hysteresis synchronous
design is wound much like that of the
conventional squirrel cage motor, its rotor
is made of a heat-treated cast permanent
magnet alloy cylinder (with a nonmagnetic
support) securely mounted to the shaft.
The motor’s special performance characteristics
are associated with its rotor design.
The rotor starts on the hysteresis principle
and accelerates at a fairly constant
rate until it reaches the synchronous speed
of the rotating field.
Instead of the permanently fixed poles
found in the rotor of the reluctance synchronous design, hysteresis rotor poles
are “induced” by the rotating magnetic
field. During the acceleration period, the
stator field will rotate at a speed faster than
the rotor, and the poles which it induces in
the rotor will shift around its periphery.
When the rotor speed reaches that of the
rotating stator field, the rotor poles will
take up a fixed position.
Like the reluctance synchronous motor,
the coupling angle in hysteresis motors is
not rigid, and if the load is increased beyond
the capacity of the motor, the poles
on the periphery of the rotor core will shift.
If the load is then reduced to the “pull-in”
capacity of the motor, the poles will take
up fixed positions until the motor is again
overloaded or stopped and restarted.
The hysteresis rotor will “lock-in” at any
position, in contrast to the reluctance rotor
which has only the “lock-in” points corresponding
to the salient poles on the rotor. |
Advantages: |
Synchronous motors
operate at a constant speed fixed by the
number of stator poles and the frequency
of the power supply. Within the limitations
of “pull-out” torque and no variation in line
frequency, the speed can be considered
constant.
Hysteresis synchronous motors, with
their uniform acceleration characteristics,
can pull into synchronism any load that is
within their capacity to start and accelerate. |
Disadvantages: |
Synchronizing
characteristics of the reluctance motor require
increased acceleration of the rotor at
the critical point when it approaches the
rotational speed of the field. For this reason,
it is possible that while the reluctance
motor may easily start a high inertia load, it
may not be able to accelerate the load
enough to pull it into synchronism. If that
should happen, the reluctance motor would
operate as an ordinary induction motor, but
at low efficiency and very irregular angular velocity (audibly detected as a pounding
noise). It is important, when applying synchronous
motors, to be certain that they
will accelerate the loads to synchronous
speed under the most adverse load and
voltage conditions. See figure below. |
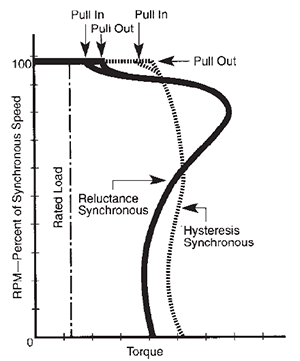 |
Comparison of typical speed
curves for hysteresis and reluctance synchronous
motors of identical frame size. |
|
| In general, synchronous motors should
only be applied in cases where the load
needs to be driven at an exact rate of
speed. For a given horsepower, synchronous
motors are usually larger and more
costly than nonsynchronous motors. In
other words, for a given frame size, synchronous
motors (vs. nonsynchronous)
have lower hp ratings and tend to be more
expensive. Stated still another way, a synchronous
motor will often be larger than a
nonsynchronous motor to drive a given
application. Because of these factors, synchronous
motors tend to be applied only
where the synchronous feature is absolutely
necessary. |
| |
